| roboShock.de |
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
Hardware with ESP8266 microcontroller since Nov 2016
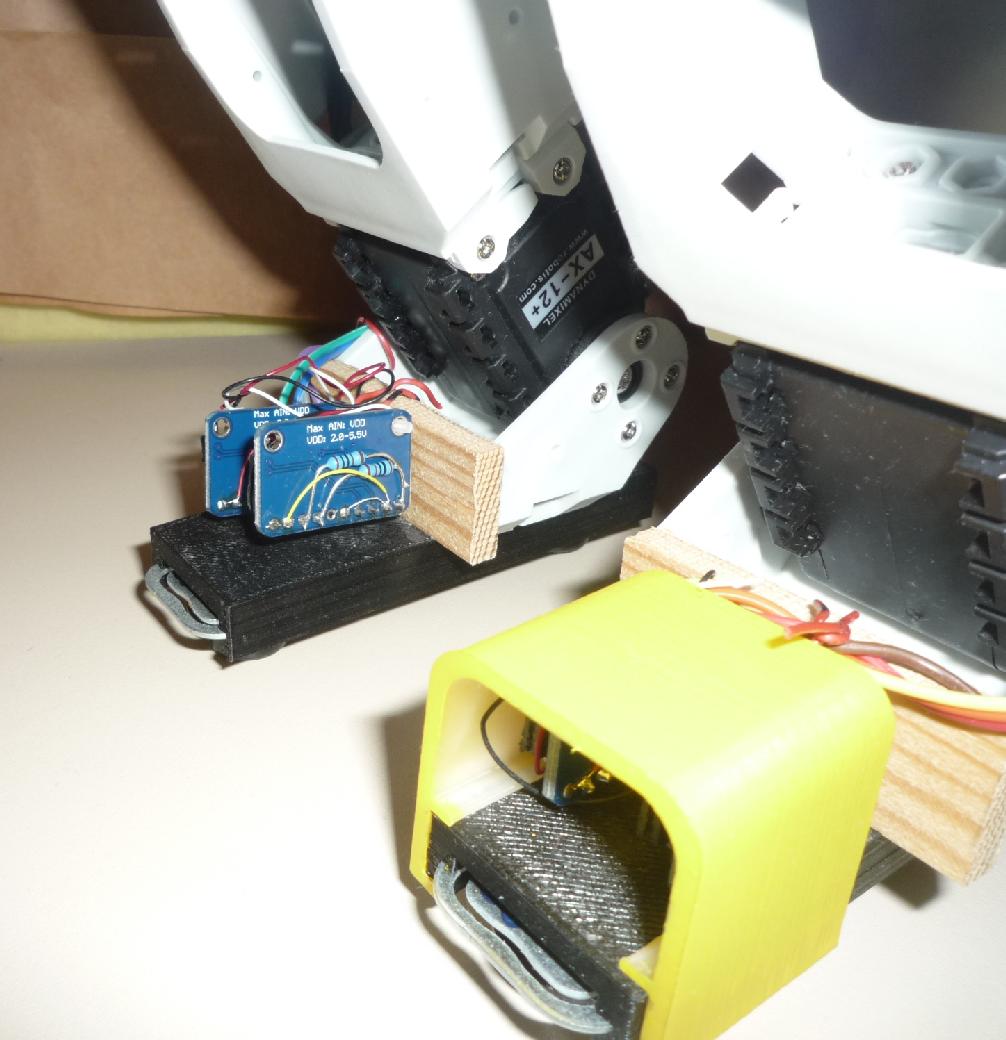
ActorsI use AX-12 digital servos from dynamixel. The connection between the AX-12 bus and the ESP8266 is documented on github: https://github.com/tschuett-munich/ax12espSensors- MPU-6050 3-achse gyroscope and 3-achse accelerometer - 4 force sensors, at each foot one in the front and one in the rear,connected to the ESP via 4 single ADS1115 analog-to-digital converters. The dynamixel controller (the big gray brick) is not in use. I only use the akku pack in there. 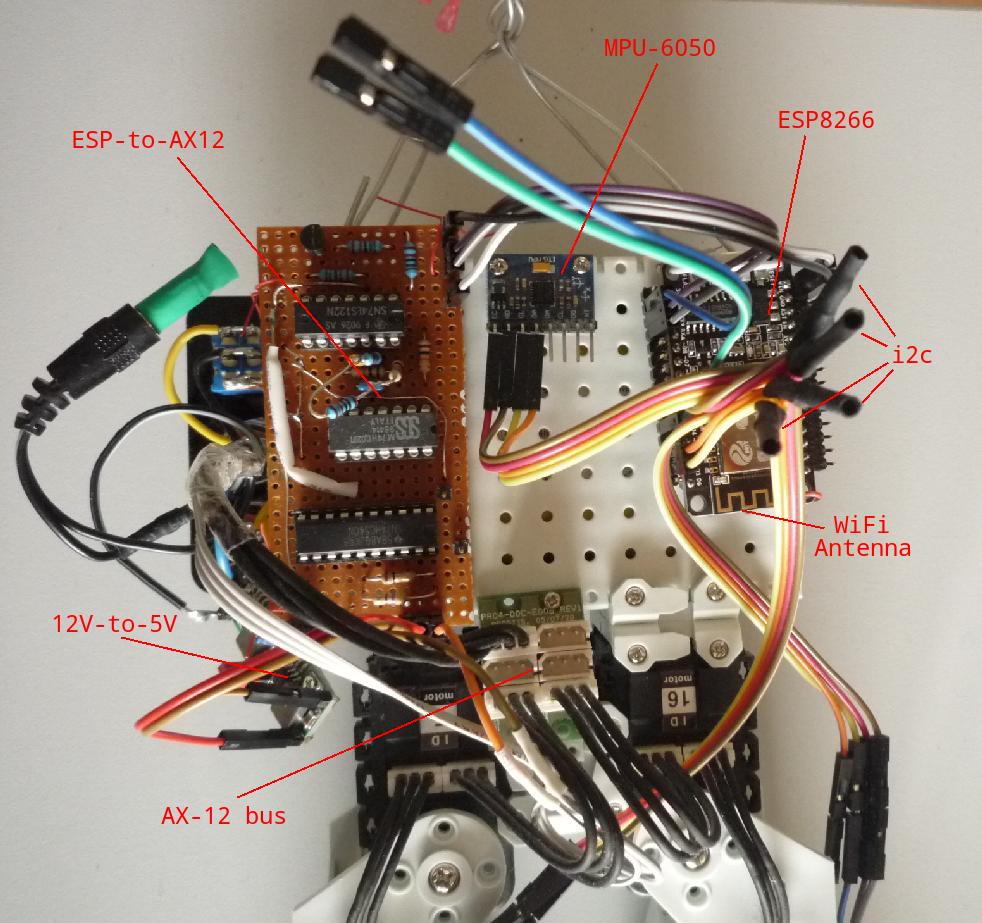
The ADS1115 is a 16 bit A/D converters with differential input (as an optional configuration). It is possible to connect the sensors directly to get an input reading of delta 180, from no weight to heavy weight. As the sensors are half bridge only, I added two 1000 Ohm 1% resistors to make it a full bridge. You can find more info about the sensors at the old HW page, down at the bottom. 

|
(c) Copyright 2012-2016 Thomas Schütt